- Комплексное оснащение детских садов
- Комплексное оснащение школ
- Готовые решения для образования
- Образовательная робототехника и конструкторы
- Цифровые лаборатории и лабораторное оборудование
- Микроэлектроника
- 3D(5D) принтеры, сканеры, станки и комплектующие
- Квадрокоптеры и беспилотники
- VR технологии
- Интерактивные пособия
- Интерактивное оборудование, панели, доски, проекторы и крепления
- Книги, карты, печатные издания, пособия и таблицы
- Развивающие игры и игрушки
- Техника и электроника
- Мебель
- Микроскопы, телескопы, бинокли и прочая оптика
- Школьные доски
- Новые товары
Образовательный набор для изучения многокомпонентных робототехнических систем и манипуляционных роботов"РобоПаук ИН ПРО". Полный комплект на Raspberry Pi

(0) |
Код товара: HW2019192
Наличие: много

385 000 руб. / шт.
До конца акции осталось:
00дн.
00час.
00мин.
Конструктор для изучения многокомпонентных робототехнических систем и манипуляционных роботов. Предназначен для углубленного изучения программирования.
Полное описание
| Возраст | от 10 до 14 лет (Основное общее), от 14 до 18 лет (Среднее общее), от 18 лет |
| Язык программирования | Python, Javascript, C++ |
| Классификация робототехники и конструкторов | Роботы - манипуляторы |
| Артикул | HW2019192 |
| Бренд | Техник |
| Страна производства | Китай |
| Вес грамм. | 5000 |
| Умения и навыки | Алгоритмика |
Поделиться


Образовательный набор для изучения многокомпонентных робототехнических систем и манипуляционных роботов"РобоПаук ИН ПРО". Полный комплект на Raspberry Pi
(0) |
Наличие: много
385 000 руб.
Вы-бюджетная организация?
Закажите по программе госзакупок (ФЗ 44, 223, 275)
Доставка по всей России и СНГ
Отправка заказа в течении трех рабочих дней. Работаем с CDEK, Деловые Линии, Почта России и EMS
Для физических лиц и частных организаций
Работаем только по 100% предоплате
Для юридических лиц (бюджетные учреждения)
Возможно несколько вариантов оплаты
50% предоплата
остальное-по факту получения товара
30% предоплата
остальное-по факту получения товара
Оплата по факту поставки товара
Работаем по ФЗ
Предоставляем параметры оборудования
для технической документации
Создаем спецификации
и подбираем оборудование под ваши требования
Общие сведения:
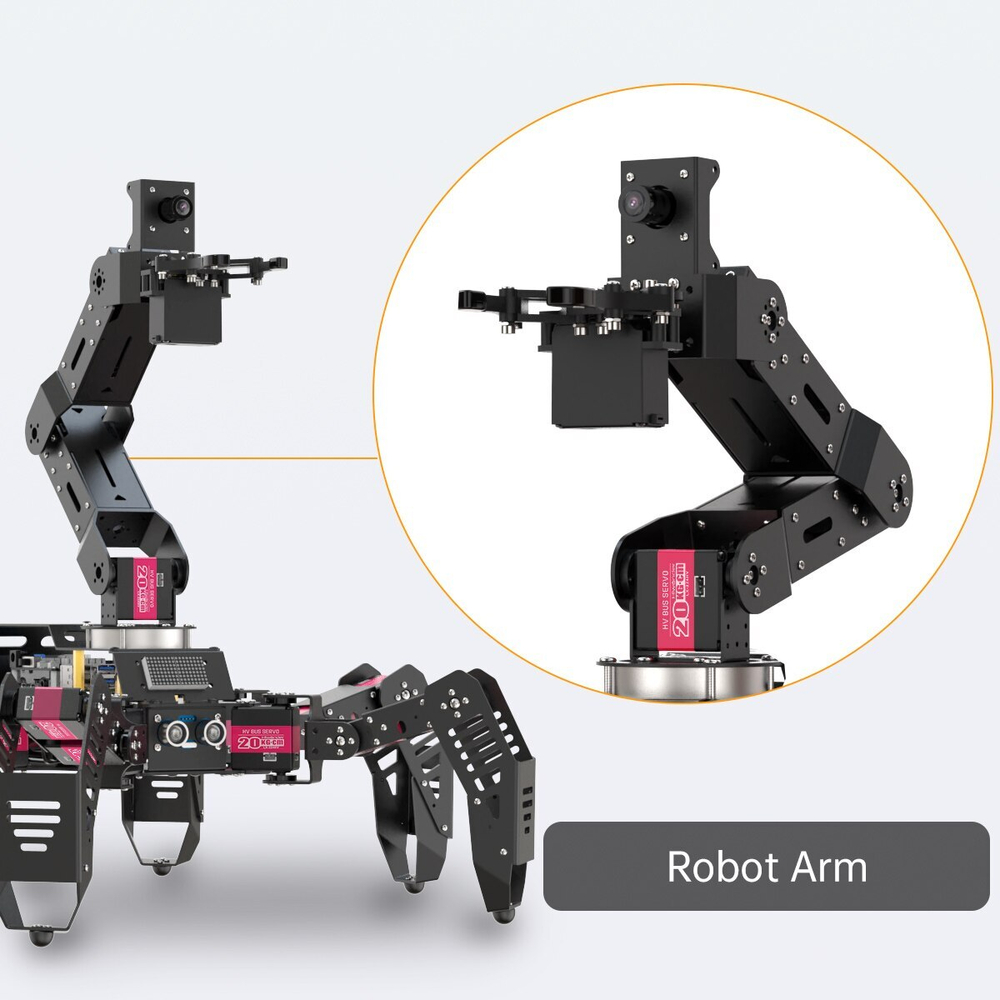
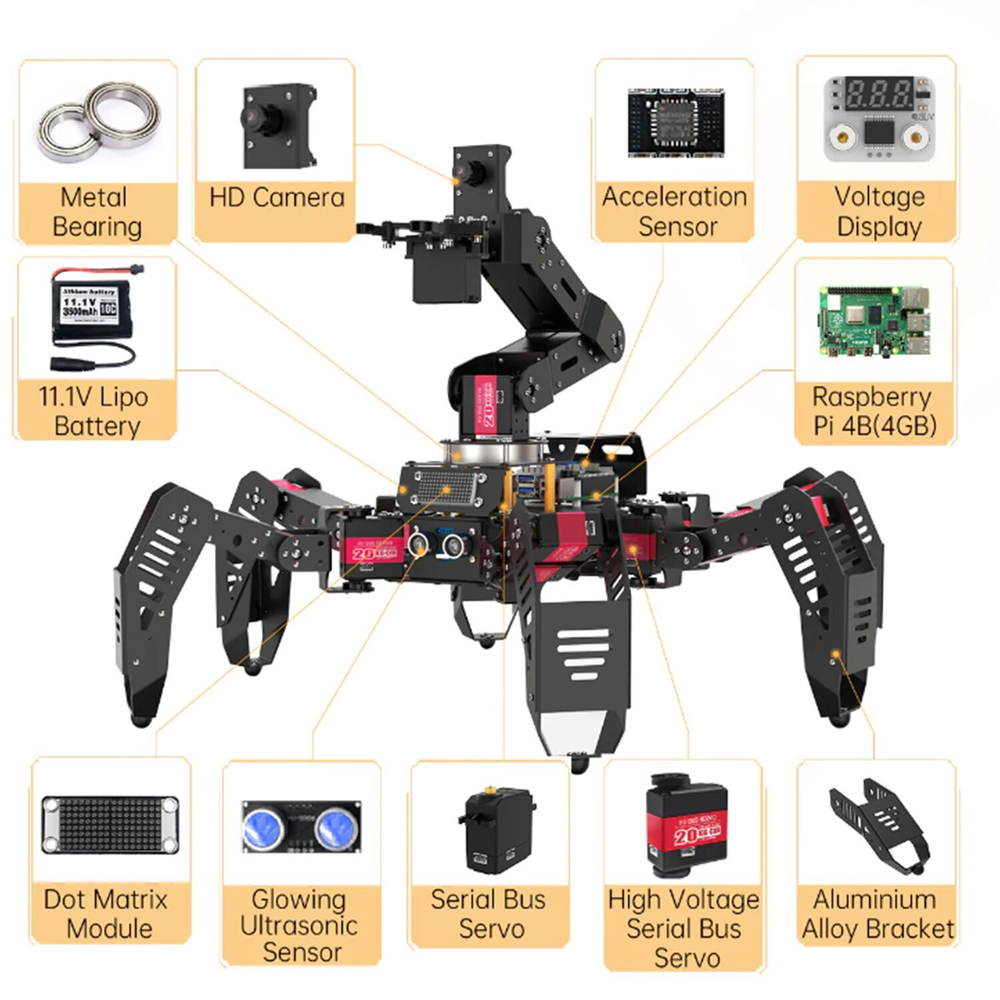
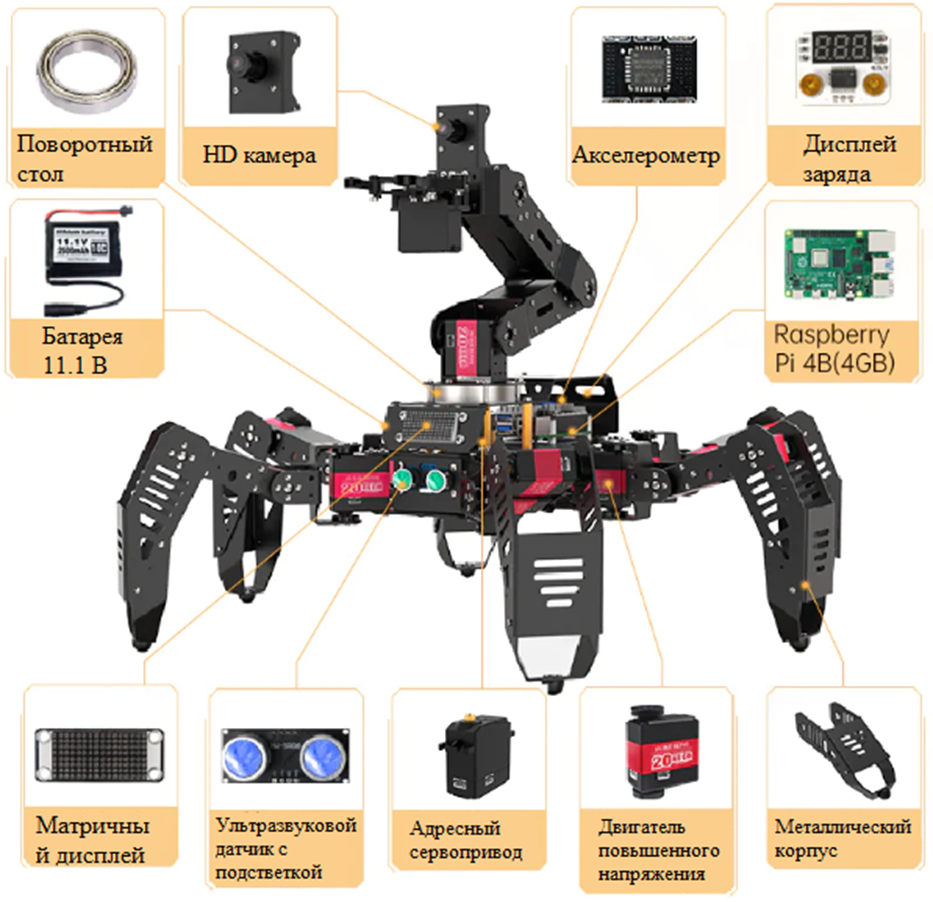
Конструктор для изучения многокомпонентных робототехнических систем и манипуляционных роботов. Предназначен для углубленного изучения программирования. Программирование возможно на языках C++, Python, Java, Java Script и др. В комплект входит плата RaspberryPi 4B с 4 ГБ ОЗУ или эквивалент. Система технического зрения с возможностью применения алгоритмов машинного обучения и настройки параметров нейросетей. Система технического зрения должна обеспечивать функционал распознавания различных геометрических объектов по набору признаков, распознавания графических маркеров, распознавания массивов линий и элементов дорожных знаков и разметки.В комплект входит манипулятор с 6 степенями свободы, который позволяет захватывать и перемещать объекты весом до 450г
Возможности набора:
- Объектно-ориентированный подход в программировании;
- Возможность углубленно изучать машинное зрение и машинное обучение,
- Возможно программирование на Python, HTML 5, JavaScript, JQuery, Java, C, C ++, Perl и Erlang.
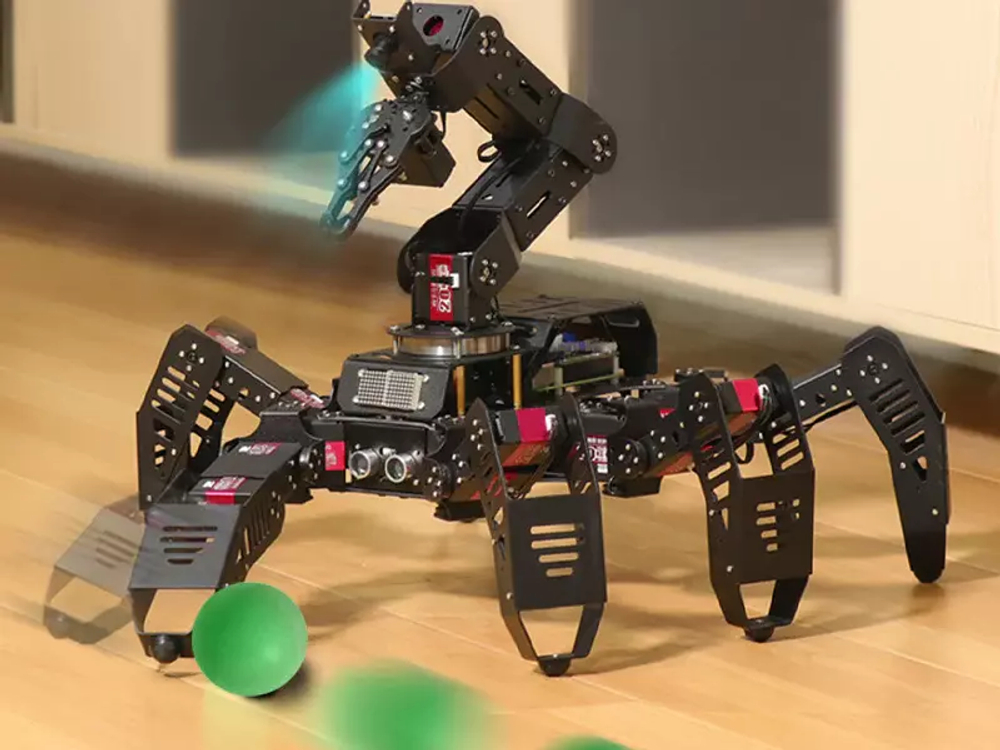
- Благодаря своей конструкции с шестью ногами, гексаподы обладают высокой устойчивостью.
- Шестиногие роботы имеют большую гибкость и маневренность по сравнению с роботами с меньшим количеством ног. Они способны выполнять сложные движения, повороты и изменения траектории. захват и перенос объектов.
- Качественное исполнение деталей для сборки;
- Возможность программировать с компьютера, ноутбука, телефона
- Возможность удаленного управления через интернет
Уровни обучения:
Исследовательский уровень: Знакомство со сложной кинематикой, основы тригонометрии, углубленное изучение текстовых языков программирования, изучение физических основ работы датчиков (Расчет траектории движения, массивы данных)
Продвинутый уровень: Изучить алгоритмы поиска пути: A*, Dijkstra, RRT, PRM, Развитие навыков планирования движения: локальное и глобальное планирование, планирование траекторий. Распознавания графических маркеров, распознавание массивов линий и элементов дорожных знаков и разметки.
Составные части:
�� ��������� ����������� ������� ��������� � ������ �������� �������� ������� �� ������ ��������, ����� ���� ������� �������� ����������� �������� �� ���������� ����.
�������� �� ������
�������� (��-��). ������ �������� ����� � ���� ������ � 18 �� 21.00 (��� �������, ��� ����� ����������� �� 18.00), ���� ������� ���������� ��� (���� ����� ����������� ����� 18.00).
�����������
�� ������ ������� ���������� �� ����� ����� � ����� ���� � ������� ��� �����. ���� ������ � ���������� ������� �������� ����� ������ �����. ��������������� ����� ����� ���������� ��� � ������� ���� ������� ����.
Запросить консультацию о товаре
")

")
(2) |
2 715 руб.
Наличие: мало
")
 ручной гранаты РГД без имитационного запала (УРГ-Н)")
(0) |
2 572 руб.
Наличие: мало


(117) |
1 500 руб.
Наличие: мало
")
 ручной гранаты Ф-1 без имитационного запала (УРГ)")
(0) |
3 286 руб.
Наличие: много
 для хранения ученических принадлежностей")
(4) |
24 030 руб.
Наличие: Под заказ






 ACF с системой StarLock (без треноги)")







")



НПО ДО основанная в 2015 году, является поставщиком комплексных решений для STEAM Education. Наша ценность состоит в том, чтобы сконцентрировать наши ресурсы на расширении ассортимента продукции, предоставлении комплексных курсов, поддержании актуальности продуктов и учебных программ, соблюдении мировых стандартов и новейших образовательных концепций и высоких стандартов обслуживания.
НПО ДО предоставляет инновационные продукты и решения для образования и разработчиков STEAM по всему миру.
Наши продукты и услуги включают разработку программного обеспечения, оборудования и комплексных учебных программ, предназначенных для разных возрастов и для соревнований по робототехнике. Имея более 40 технических патентов и разработав сотни аппаратных средств с открытым исходным кодом и образовательных роботов, таких как интеллектуальный бионический робот, настольный роботизированный манипулятор, комплект IoT, робот с искусственным интеллектом и т.д.
Продукты и решения Hiwonder продаются и используются более чем в 80 странах, 2000 школах и учреждениях. более 300 000 учителей и студентов для обучения STEAM.
Рекомендуем приобрести
 Образовательный набор для изучения многокомпонентных робототехнических систем и манипуляционных роботов 447 670 руб.
Образовательный набор для изучения многокомпонентных робототехнических систем и манипуляционных роботов 447 670 руб.  Базовый набор учебного манипулятора "Четырехосевой робот". 345 000 руб.
Базовый набор учебного манипулятора "Четырехосевой робот". 345 000 руб.  Учебный комплект автономных мобильных роботов для изучения операционных систем реального времени 482 900 руб.
Учебный комплект автономных мобильных роботов для изучения операционных систем реального времени 482 900 руб.  Базовый робототехнический набор для конструирования, изучения электроники и микропроцессоров и информационных систем и устройств "Айва" 106 300 руб.
Базовый робототехнический набор для конструирования, изучения электроники и микропроцессоров и информационных систем и устройств "Айва" 106 300 руб.  Базовый робототехнический набор для изучения систем управления робототехническими комплексами и андроидными роботами "Сережа ИН Про". Полный комплект на Raspbery Pi 385 700 руб.
Базовый робототехнический набор для изучения систем управления робототехническими комплексами и андроидными роботами "Сережа ИН Про". Полный комплект на Raspbery Pi 385 700 руб. 