- Комплексное оснащение детских садов
- Комплексное оснащение школ
- Готовые решения для образования
- Образовательная робототехника и конструкторы
- Цифровые лаборатории и лабораторное оборудование
- Микроэлектроника
- 3D(5D) принтеры, сканеры, станки и комплектующие
- Квадрокоптеры и беспилотники
- VR технологии
- Интерактивные пособия
- Интерактивное оборудование, панели, доски, проекторы и крепления
- Книги, карты, печатные издания, пособия и таблицы
- Развивающие игры и игрушки
- Техника и электроника
- Мебель
- Микроскопы, телескопы, бинокли и прочая оптика
- Школьные доски
- Новые товары
Датчик угла поворота вала (энкодер)
(0) |
Код товара: 4530583
Наличие: много

1 960 руб. / шт.
До конца акции осталось:
00дн.
00час.
00мин.
Датчик угла поворота вала пригодится тогда, когда вам нужно повернуть вал на заданный угол или количество оборотов, но рабочего угла серводвигателя в 180 градусов не хватает. Чаще всего энкодеры используют чтобы измерять пройденный роботом путь, крепя их напрямую к двигателям и измеряя угол, на который провернулся вал колеса
Полное описание
| Классификация робототехники и конструкторов | Датчики, запчасти, аксессуары |
| Артикул | 4530583 |
| Бренд | Роботрек |
| Страна производства | Россия |
| Вес грамм. | 500 |
| Количество деталей | 1 шт. |
Поделиться

Вы-бюджетная организация?
Закажите по программе госзакупок (ФЗ 44, 223, 275)
Доставка по всей России и СНГ
Отправка заказа в течении трех рабочих дней. Работаем с CDEK, Деловые Линии, Почта России и EMS
Для физических лиц и частных организаций
Работаем только по 100% предоплате
Для юридических лиц (бюджетные учреждения)
Возможно несколько вариантов оплаты
50% предоплата
остальное-по факту получения товара
30% предоплата
остальное-по факту получения товара
Оплата по факту поставки товара
Работаем по ФЗ
Предоставляем параметры оборудования
для технической документации
Создаем спецификации
и подбираем оборудование под ваши требования
Работа энкодера основана на следующем принципе: внутри корпуса располагается непрозрачный диск с прорезями и 2 щелевых оптических датчика. Каждый датчик имеет собственный вывод (поэтому у модуля 2 шины). В процессе вращения диск с помощью своих прорезей поочередно заставляет срабатывать тот или иной канал датчика. По взаимному состоянию каждого из каналов можно судить о направлении вращения. Подробнее об энкодерах - здесь.
Подключение
Датчик использует два стандартных 3-пиновых разъема и подключается в порты IN контроллера "Трекдуино". Для подключения одного датчика требуется 2 свободных порта (по одному на каждый канал). Всего можно подключить и использовать до 4 энкодеров.
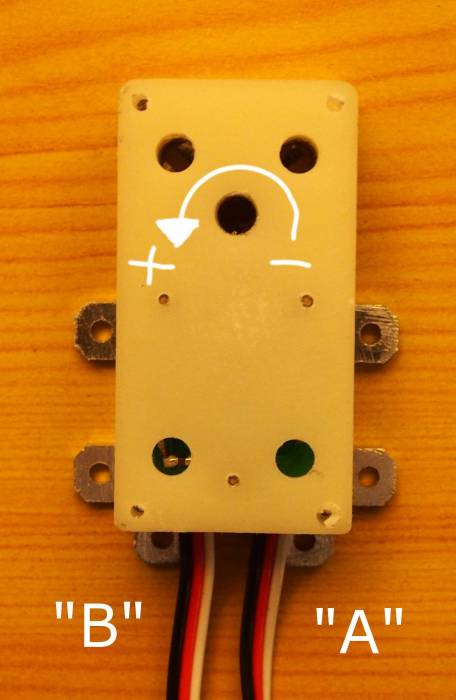
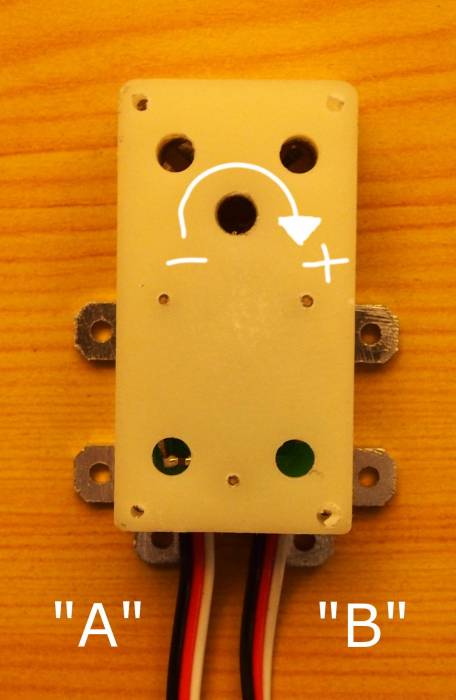
При подключении датчика следует выбрать, какой из проводов будет «каналом А», а какой - «каналом B». Соответствие каналов и проводов не фиксированное, пользователь сам должен выбрать в зависимости от ситуации, руководствуясь при это правилом: при чтении показаний датчика программа будет принимать за положительное направление вращение от «А» в сторону «В», например
�� ��������� ����������� ������� ��������� � ������ �������� �������� ������� �� ������ ��������, ����� ���� ������� �������� ����������� �������� �� ���������� ����.
�������� �� ������
�������� (��-��). ������ �������� ����� � ���� ������ � 18 �� 21.00 (��� �������, ��� ����� ����������� �� 18.00), ���� ������� ���������� ��� (���� ����� ����������� ����� 18.00).
�����������
�� ������ ������� ���������� �� ����� ����� � ����� ���� � ������� ��� �����. ���� ������ � ���������� ������� �������� ����� ������ �����. ��������������� ����� ����� ���������� ��� � ������� ���� ������� ����.
Запросить консультацию о товаре
")

")
(1) |
2 715 руб.
Наличие: мало
")
 ручной гранаты РГД без имитационного запала (УРГ-Н)")
(0) |
2 572 руб.
Наличие: мало











")



Конструкторы для детей и взрослых Роботек – это наборы для создания разнообразных моделей роботов, которые можно «оживить» с помощью прилагаемого оборудования. В линейке представлены комплекты для сборки разного уровня от простого для ребят 5-8 лет до сложных, при работе с которыми понадобятся инженерные, конструкторские навыки и программирование. Роботек предлагает наборы конструкторов и комплектующих, аксессуаров для продуктивных занятий робототехникой. Первая ступень освоения – набор «Малыш 1» и «Малыш 2». Работая с ними, ребенок 3-6 лет научится собирать модели с заданными параметрами. С дополнительным комплектом «Малыш Проект» юный техник сможет импровизировать, применяя полученные навыки сборки. Набор Роботрек Базовый – это основной представитель серии. На его основе можно собирать разные модели роботов, задавать программы для действий и движений созданных моделей. Конструктор станет помощником учителям физики, трудов и механики – работая с роботами, дети лучше понимают принципы физических законов и явлений, взаимосвязей действий окружающего мира. Следующая ступень развития – конструкторы высокого уровня сложности: «Инженер», «Стажер». Это общеобразовательные конструкторы для средней и старшей школы.
Рекомендуем приобрести
 АРТИНТРЕК ПРО от 11 лет") Образовательный комплекс по изучению основ искусственного интеллекта (НЕЙРОСЕТИ ) АРТИНТРЕК ПРО от 11 лет 315 000 руб.
Образовательный комплекс по изучению основ искусственного интеллекта (НЕЙРОСЕТИ ) АРТИНТРЕК ПРО от 11 лет 315 000 руб.  Электронный конструктор Роботрек Малыш 1 41 310 руб.
Электронный конструктор Роботрек Малыш 1 41 310 руб.  АРТИНТРЕК БАЗОВЫЙ") Образовательный комплекс по изучению основ искусственного интеллекта (НЕЙРОСЕТИ ) АРТИНТРЕК БАЗОВЫЙ 255 000 руб.
Образовательный комплекс по изучению основ искусственного интеллекта (НЕЙРОСЕТИ ) АРТИНТРЕК БАЗОВЫЙ 255 000 руб.  Конструктор «РОБОТРЕК СТАЖЕР А» 84 500 руб.
Конструктор «РОБОТРЕК СТАЖЕР А» 84 500 руб.  Электронный конструктор Роботрек Малыш 2 45 080 руб.
Электронный конструктор Роботрек Малыш 2 45 080 руб. 